10 KiB
🔥 Laser CANbus Toolhead PCB
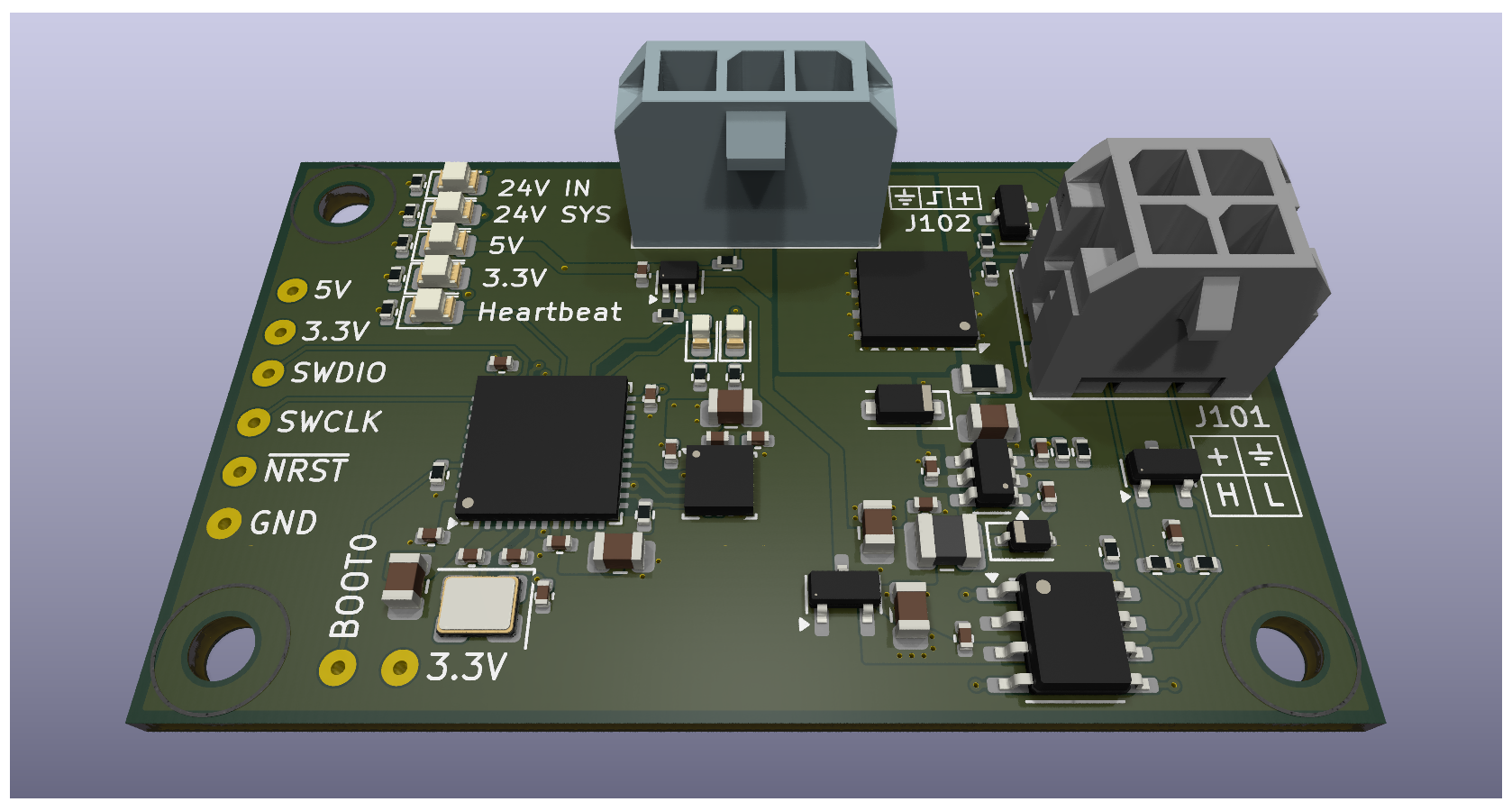
Ein kompaktes, robustes Toolhead-Board für Klipper-basierte Lasergravierer und -schneider (CoreXY). Dieses Board integriert Stromversorgung, Lasertreiber-Logik, CAN-Bus Kommunikation und Input Shaping (ICM-20602) auf kleinstem Raum.
📚 Inhalt
- 🔥 Laser CANbus Toolhead PCB
✨ Features
🧠 Mikrocontroller
- MCU: STM32F072CBU6 (Cortex-M0, 48MHz, CAN-fähig)
- Stabilität: 12MHz Quarz für maximale CAN-Bus Stabilität
- Firmware: Klipper-kompatibel
🔗 CAN-Bus Kommunikation
- Transceiver: SN65HVD230 mit ESD-Schutz
- Terminierung: Split-Terminierung via Solder-Jumper
- Slope-Control: Schaltbar für EMI-Optimierung
📊 Input Shaping
- Sensor: On-board ICM-20602 Beschleunigungs-/Gyroskopsensor (SPI)
- Zweck: Klipper Resonanzmessung für perfekte Druckqualität
- Vorteil: Bessere Verfügbarkeit und moderne Sensortechnologie
⚡ Laser-Leistungssteuerung
- Schaltung: 24V / 6A High-Side Switch (CJAC70P06 P-MOSFET, 60V Spannungsfestigkeit)
- Spitzenstrom: 8A Fähigkeit
- Soft-Start: Begrenzt Einschaltstrom (Rise-Time ca. 1.2ms)
- Sicherheit: Hardware-Pull-Down verhindert ungewollte Aktivierung
- Begrenzung: Max 6A begrenzt durch Micro Fit 3.0 Steckverbinder mit 0.75mm² Draht
🎛️ Laser-Signalsteuerung
- PWM: 5V Level-Shifted via 74AHCT1G125 Buffer
- Qualität: Saubere Flanken, echtes Hardware-PWM via STM32 Timer
- Kompatibilität: Gängige Diodenlaser
🔌 Stromversorgung
- Eingang: 24V mit 250mA PTC-Sicherung und SMF24A TVS-Diode
- 5V Rail: MP2459 Buck Converter (bis 60V Input tolerant)
- 3.3V Rail: XC6206 LDO für MCU und Peripherie
🚨 Diagnose & Monitoring
- Power-LEDs: 24V In, 24V Sys, 5V, 3.3V
- Status-LEDs: Laser-Enable, Laser-PWM, Heartbeat
📋 Klipper Konfiguration
Basis MCU Setup
[mcu toolhead]
canbus_uuid: <deine-uuid> # Mit "ls /dev/serial/by-id/*" oder "~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0" ermitteln
[temperature_sensor toolhead_mcu]
sensor_type: temperature_mcu
sensor_mcu: toolhead
Input Shaping (ICM-20602)
[mpu9250]
cs_pin: toolhead:PA4
spi_bus: spi1
#axes_map: x,y,z # Je nach Drucker-Orientierung konfigurieren
[resonance_tester]
accel_chip: mpu9250
probe_points:
150, 150, 20 # An deine Druckbettgröße anpassen
Laser Steuerung
# Laser PWM Signal
[output_pin laser_pwm]
pin: toolhead:PB14
pwm: True
cycle_time: 0.001 # 1kHz PWM Frequenz
shutdown_value: 0 # Sicherheit: Laser aus bei Notfall
# Laser Enable (optional)
[output_pin laser_enable]
pin: toolhead:PB15
value: 0
shutdown_value: 0
# Heartbeat LED (optional)
[output_pin heartbeat]
pin: toolhead:PA9
pwm: True
cycle_time: 1.0
🔌 Pinout & Steckerbelegung
J101 - Power & CAN Input (Micro-Fit 3.0, 2x2)
| Pin | Signal | Beschreibung |
|---|---|---|
| 1 | +24V | Hauptstromversorgung (High Current) |
| 2 | GND | Masse |
| 3 | CAN_H | CAN-Bus High Signal |
J101 - Strom & CAN Eingang (Micro-Fit 3.0, 2x2, THT)
| Pin | Signal | Beschreibung |
|---|---|---|
| 1 | +24V | Hauptstromversorgung (High Current) |
| 2 | GND | Masse |
| 3 | CAN_H | CAN-Bus High Signal |
| 4 | CAN_L | CAN-Bus Low Signal |
J102 - Laser Output (Micro-Fit 3.0, 1x3, THT)
| Pin | Signal | Beschreibung |
|---|---|---|
| 1 | GND | Laser-Masse |
| 2 | PWM | 5V PWM-Signal (Level-Shifted) |
| 3 | +24V | Geschaltete Laser-Stromversorgung (Soft-Start) |
Debug/Programming Header (Rückseite)
| Pad | Pin | Signal | Funktion |
|---|---|---|---|
| 1 | - | 5V | 5V Einspeisung (vom Programmer) |
| 2 | - | 3.3V | VTref (Referenzspannung) |
| 3 | PA13 | SWDIO | Serial Wire Debug I/O |
| 4 | PA14 | SWCLK | Serial Wire Debug Clock |
| 5 | - | NRST | Reset-Signal |
| 6 | - | GND | Masse |
💡 Bootloader-Modus: Um den STM32 in den DFU/Bootloader-Modus zu versetzen (z.B. für Erst-Flash mit Katapult), brücke das BOOT0 Pad mit 3.3V während des Einschaltens.
🔧 Installation & Setup
1. CAN-Bus Konfiguration
- CAN-Bus Terminierung je nach Position im Netzwerk setzen
- Baudrate: 1 Mbit/s (Standard für Klipper)
2. Firmware Flash
- Board in DFU-Modus versetzen (BOOT0 brücken)
- Klipper für STM32F072 mit CAN-Support kompilieren
- Firmware flashen:
make flash FLASH_DEVICE=<dfu-device>
3. UUID ermitteln
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
⚠️ Sicherheitshinweise
- Laser-Sicherheit: Immer Schutzbrille tragen
- Stromversorgung: Nur mit 24V DC betreiben
- Erste Inbetriebnahme: Laser-Leistung langsam hochfahren
- Notfall: Hardware-Pull-Down sorgt für sicheren Zustand
🛠️ BOM (Bill of Materials) - Highlights
| Komponente | Wert/Typ | Funktion | Package | Bestellnummer |
|---|---|---|---|---|
| U101 | STM32F072CBU6 | Hauptmikrocontroller | UFQFPN-48 | STM32F072CBU6 |
| U102 | MP2459GJ-Z | Buck Converter 24V→5V | TSOT-23-8 | MP2459GJ-Z |
| U105 | SN65HVD230DR | CAN-Bus Transceiver | SOIC-8 | SN65HVD230DR |
| U106 | ICM-20602 | 6-Achsen IMU (Beschleunigungs-/Gyroskop) | LGA-16 | ICM-20602 |
| Q101 | CJAC70P06 | P-MOSFET (Laser-Schalter, 60V) | SOIC-8 | CJAC70P06 |
| D101 | SMF24A | TVS-Diode (Überspannungsschutz) | DO-214AC | SMF24A |
| F101 | 1812L025 | PTC-Sicherung 250mA | 1812 | 1812L025 |
| Y101 | 12MHz | Quarz für CAN-Stabilität | HC-49/S | 12MHz Quarz |
| J101/J102 | Micro-Fit 3.0 | THT Steckverbinder | THT | Micro-Fit 3.0 THT |
🛠️ Technische Spezifikationen
| Parameter | Wert | Einheit |
|---|---|---|
| Eingangsspannung | 24 ± 2 | V |
| Laser-Strom (max) | 4 | A |
| CAN-Baudrate | 1 | Mbit/s |
| PWM-Frequenz | 1 | kHz |
| Soft-Start Zeit | ~1.2 | ms |
| Betriebstemperatur | -10 bis +70 | °C |
| Abmessungen | TBD | mm |
📝 Changelog
Rev. 0.1
- Transistor Upgrade: MOSFET durch CJAC70P06 ersetzt (60V Spannungsfestigkeit)
- Sensor Upgrade: Wechsel von ADXL345 zu ICM-20602 (bessere Verfügbarkeit, moderner 6-Achsen IMU)
- Steckverbinder Änderung: Micro Fit 3.0 Steckverbinder von SMD zu THT geändert
- Bestückungsdruck Verbesserung: Steckerbelegungen zum Bestückungsdruck hinzugefügt für einfachere Montage
- Layout Verbesserungen: Bestückungsplatz aufgeräumt und Routing optimiert
- Dokumentation: Übersichtsbild an aktuelles Design angepasst
- BOM Update: Bauteil-Bestellnummern hinzugefügt und Produktionsdaten aktualisiert
- Produktionsdateien: Montage- und Produktionsdateien mit aktuellen Bauteilen aktualisiert
Rev. 0.0 (Erste Veröffentlichung)
- Erstes PCB-Design mit STM32F072CBU6 Mikrocontroller
- CAN-Bus Kommunikation mit SN65HVD230 Transceiver
- 24V/4A Laser-Leistungssteuerung mit AO4407A MOSFET
- ADXL345 Beschleunigungssensor für Input Shaping
- MP2459 Buck Converter für Stromversorgung
📚 Weitere Ressourcen
Lizenz
Dieses Projekt steht unter der Creative Commons Namensnennung-Nicht kommerziell-Share Alike 4.0 International Lizenz (CC BY-NC-SA 4.0).
![]()
Dies bedeutet, Sie dürfen:
- Teilen — das Material in jedwedem Format oder Medium vervielfältigen und weiterverbreiten
- Bearbeiten — das Material remixen, verändern und darauf aufbauen
Unter folgenden Bedingungen:
- Namensnennung — Sie müssen angemessene Urheber- und Rechteangaben machen, einen Link zur Lizenz beifügen und angeben, ob Änderungen vorgenommen wurden
- Nicht kommerziell — Sie dürfen das Material nicht für kommerzielle Zwecke nutzen
- Weitergabe unter gleichen Bedingungen — Wenn Sie das Material remixen, verändern oder anderweitig direkt darauf aufbauen, dürfen Sie Ihre Beiträge nur unter derselben Lizenz wie das Original verbreiten
Den vollständigen Lizenztext finden Sie unter: https://creativecommons.org/licenses/by-nc-sa/4.0/deed.de
Hinweis: Dies ist die Originaldokumentation in deutscher Sprache. Eine englische Übersetzung finden Sie in README.md.